Biomimetic Fish Tail
Prototyping soft hydraulic tails
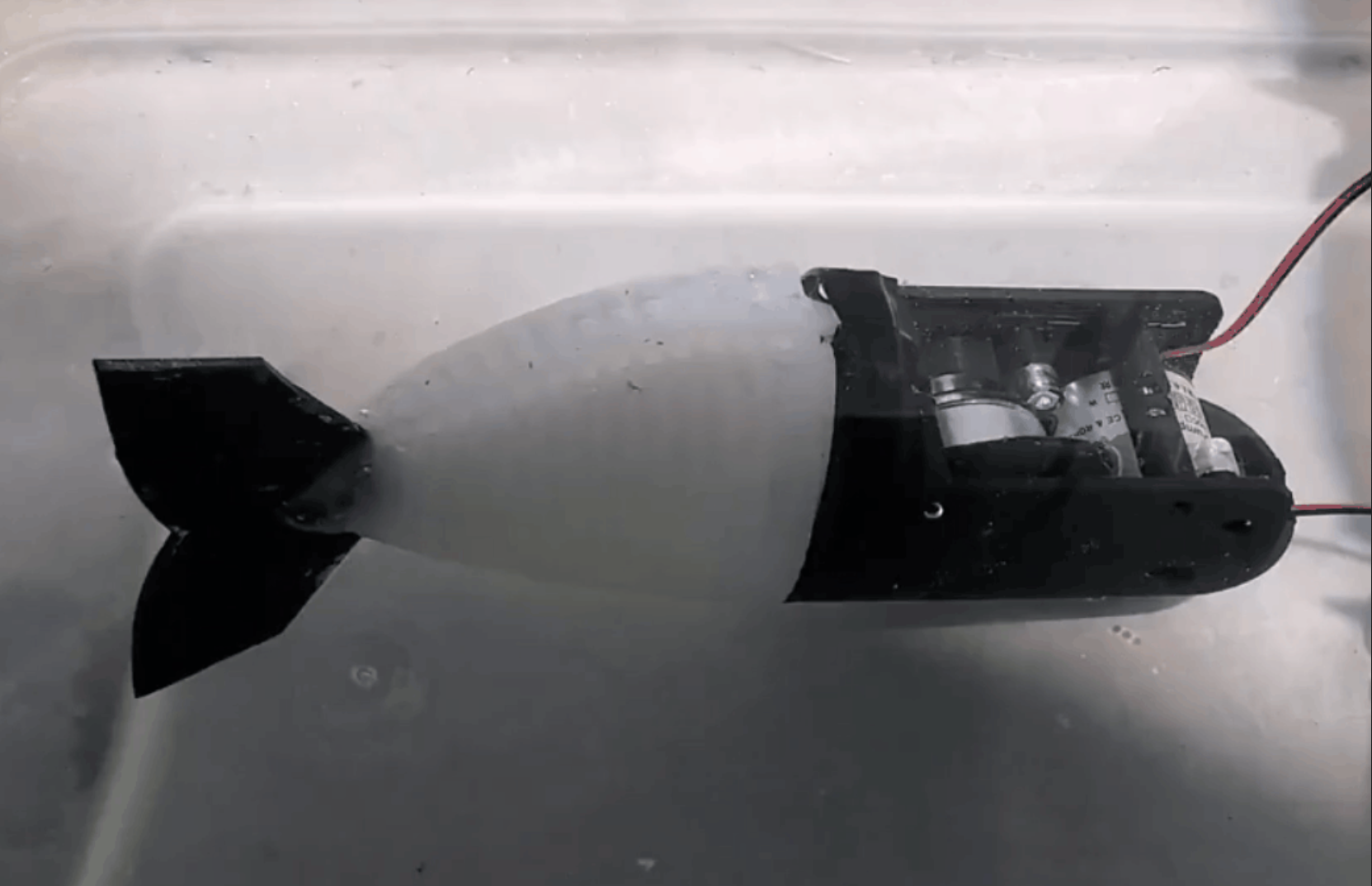
The robot fish sits in a plastic bin as its hydraulic pump is tested. The pump moves water in-between two chambers of the soft tail, causing the tail to sway back and forth.
Overview
Timeline: 6-week Final Project for Spring 2021 Robotics Systems Integration Course at Olin College
Collaborators: Amy Phung, Nathan Faber, w. Professor Melinda Malley
The goal of this project was to create a robot fish with a soft, complaint tail. We were interested in learning more about how to design, manufacture, and program such a robot. The project website goes into detail as to what we did and how the robot works.
My Contributions
I focused primarily on designing and protopying different soft robot fish tails. I made several tails out of Ecoflex with custom designed molds, and a test rig for characterizing the performance of each tail. I previously documented how to manufacture these tails from a indepedent mini-project, and continued to refine the design for this final project. I documented my characterization of each of the new tails. I coordinated with Nathan so that he could write the software for actuating this tail, and with Amy so she could manufacture an idential tail for a full system test.
Instructions for replicating my manufacturing technique can be found here. Note this guide was not for the tails I tested for the final project. These tails were the precursors to the tails I tested for the final project.