Flippybots
Influencing Emergent Structures in a Robotic Collective
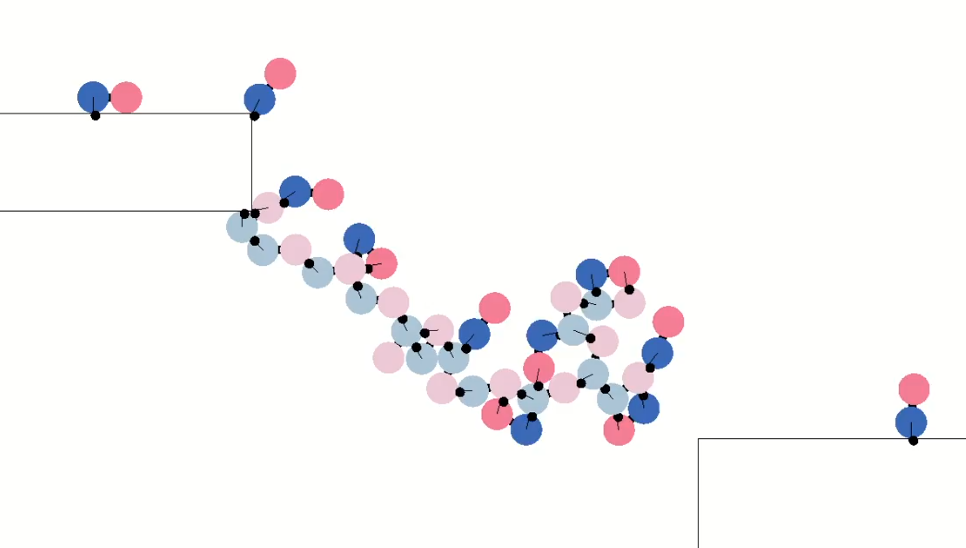
This screenshot of the flippybots simulator shows an emergent, goal-driven structure formation. The flippybots formed this structure using simple contact rules and a goal to reach the right platform from the left platform. Even though the structure itself appears to have been formed intentionally in pursuit of that global objective, the structure actually emerged from local, decentralized interactions between the flippybots.
Overview
Timeline: 1.5 year independent research project, 2021-22
Collaborators: Advised by Dr. Melinda Malley
This research explored how to influence the emergent structures that come from simple interactions between many agents in a self-assembling swarm. I took on this project independently during my last year of my undergraduate education as my first foray into robotics and artificial intelligence research. I presented the work as a poster and published an extended abstract at AAMAS 2022. The simulator can be found at this github repo.
There is plenty of work here that has yet to published and questions I would still like to investigate, but I unfortunately had to drop this research in order to focus on my new research in multiagent learning. The interesting thing about my current research is that the AI I am developing is agnostic to the exact domain, so there may be an opporutnity in the future to apply that AI to this domain for learning more intelligent structure formation behaviors.